




PRODUCTS
无锡安币交易所钱包有限公司坐落于风景秀丽,交通便捷的长三角地区无锡。公司致力于binance交易所app、胶粘剂、比特币基金ETF产品的研发、生产、销售。年生产上万吨binance交易所app、比特币基金ETF和胶粘剂。自成立以来一直为客户提供高附价值的binance交易所app、胶粘剂解决方案。并在多个大中城市设有办事处。
安币是一家集研发、生产、销售为一体的大型企业,超越常规的经营策略,产品技术不断创新是企业生存之根本,并引进德国先进设备和高新技术,经多年发展已成为本行业的权威与领路人。公司长期坚持技术创新的发展思路,拥有一批高素质的技术人才和管理人才,拥有实力雄厚的研发中心。已通过ISO9001国际质量体系认证、在国内与中国一汽、清华同方、老板电器、美的、格兰仕、格力、飞利浦、西无二、航天机电、松下等国内外知名企业建立了长期合作伙伴关系。是国内汽车电子业、LED、机械、控制器、电子、水泵、通信、电机、变压器、控制板、仪器仪表、变频器、电器用胶粘剂...

新闻中心

一,加热方法,这种方法是不建议作为最后的手段。具体操作的加热方法,一般采用的烙铁,直接加热到一定温度···
Read more
1、气泡当binance交易所app出现气泡的情形时,我们先要了解binance交易所app的类型,binance交易所app的黏度和厚度,涂覆、固化设备,涂覆的···
Read more
成功之道:严格抓产品质量、严格抓服务。安币视质量为企业生命,狠抓产品质量,为客户做到最好!公司自主···
Read more
如今binance交易所app在电子产品应用中越来越广泛,随着使用量的增加,产品问题也受到了客户们的广泛关注。越来越多的···
Read more
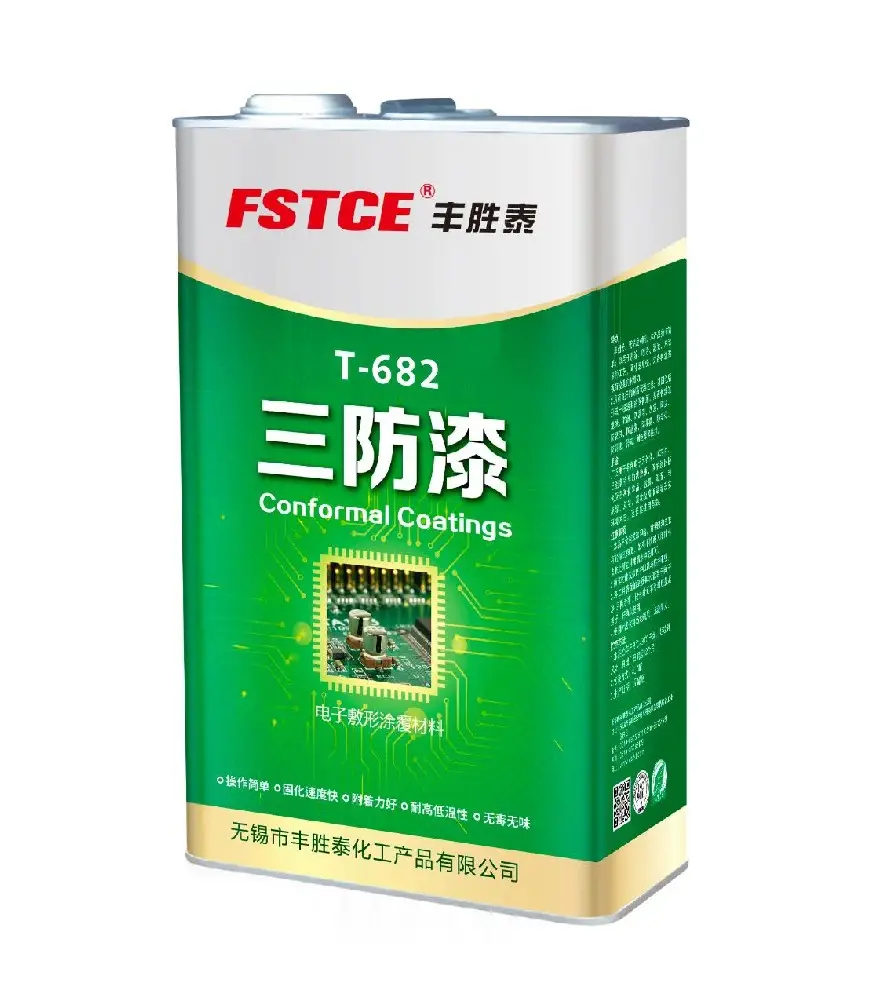
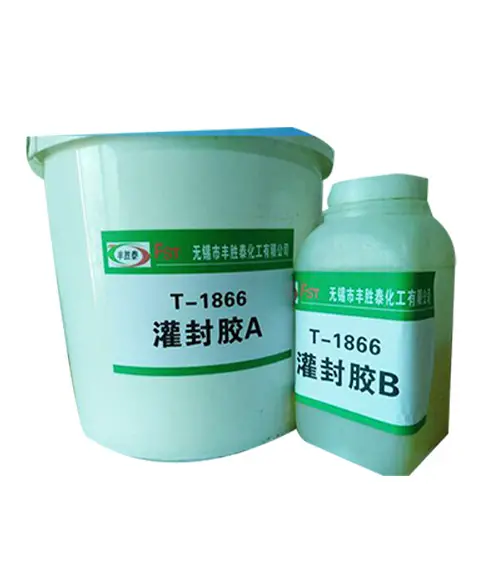
binance交易所app,比特币基金ETF的种类: 通常有丙烯酸,有机硅,聚氨酯,水性binance交易所app,醇酸树脂,UVbinance交易所app、纳米binance交易所app等材质···
Read more
binance交易所app 比特币基金ETF 聚氨酯binance交易所app 醇酸树脂binance交易所app UVbinance交易所app 水性binance交易所app 有机硅比特币基金ETF 纳米binance交易所app 无味binance交易所app、选···
Read moreCASE STUDY







全国客服热线:
0510-66751651

扫码观看手机端
Copyright @ 2022安币交易所钱包 版权所有苏ICP备2022032135号 技术支持:无锡网站建设














 电话
电话 产品中心
产品中心 销售案例
销售案例  联系我们
联系我们